PET projectors parallelproj.projectors¶
A PET sinogram projector is the last link in a short construction chain, and there are two routes depending on the scanner:
Regular-polygon route – for scanners with cylindrical symmetry and a single layer of LOR endpoints (the most common case):
RegularPolygonPETScannerGeometry→Michelogram→RegularPolygonPETLORDescriptor→RegularPolygonPETProjector.Equal-block route – for general modular geometries built from detector blocks (block / panel scanners, or any layout without cylindrical symmetry):
ModularizedPETScannerGeometry(fromBlockPETScannerModuleobjects) →EqualBlockPETLORDescriptor→EqualBlockPETProjector(noMichelogramis needed).
If your scanner has cylindrical symmetry and a single endpoint layer, use the
regular-polygon route (shown in the Quickstart); otherwise use the
equal-block route. Either way the projector is a LinearOperator:
proj(img) forward projects and proj.adjoint(sino) (or proj.H(sino))
back projects. Inputs and outputs are float32 arrays, and the same code runs
on CPU or GPU depending on the array backend / device used to build the geometry.
Forward and back projectors for PET sinograms, histograms and listmode.
Array-API-compatible LinearOperator subclasses
that call the compiled parallelproj_core backend for Joseph-based ray
tracing. Covers 2-D parallel-view projection, regular-polygon PET in sinogram
and listmode mode (non-TOF and TOF), and equal-block PET geometries.
- class parallelproj.projectors.EqualBlockPETProjector(lor_descriptor: EqualBlockPETLORDescriptor, img_shape: tuple[int, int, int], voxel_size: tuple[float, float, float], img_origin: None | Array = None, num_chunks: int = 1)[source]¶
Bases:
LinearOperatorgeometric non-TOF and TOF sinogram projector for equal block PET scanners
Examples

Non-TOF and TOF projections using a modularized (block) PET scanner geometry
Non-TOF and TOF projections using a modularized (block) PET scanner geometry- Parameters:
lor_descriptor (EqualBlockPETLORDescriptor) – descriptor of the LOR start / end points
img_shape (tuple[int, int, int]) – shape of the image to be projected
voxel_size (tuple[float, float, float]) – the voxel size of the image to be projected
img_origin (None | Array, optional) – the origin of the image to be projected, by default None means that the center of the image is at world coordinate (0,0,0)
num_chunks (int, optional) – number of chunks to split the block pairs into during projection, by default 1 (all block pairs processed in a single call). Increase this value to reduce peak memory usage at the cost of more projection kernel calls.
Examples
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
Non-TOF and TOF projections using a modularized (block) PET scanner geometry- property H: AdjointLinearOperator¶
adjoint operator \(A^H\)
- __call__(x: Array) Array¶
alias to apply(x)
Examples
- Parameters:
x (Array)
- Return type:
Array
- adjoint(y: Array) Array¶
(scaled) adjoint step \(x = \overline{\alpha} A^H y\)
- Parameters:
y (Array)
- Return type:
Array
Examples
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
- adjointness_test(xp: ModuleType | None = None, dev: str | None = None, verbose: bool = False, iscomplex: bool = False, dtype: type | None = None, **kwargs) bool¶
test whether the adjoint is correctly implemented
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.verbose (bool, optional) – verbose output
iscomplex (bool, optional) – use complex arrays
dtype (type | None, optional) – data type of the arrays
**kwargs (dict) – passed to np.isclose
- Returns:
whether the adjoint is correctly implemented
- Return type:
bool
Examples
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
- apply(x: Array) Array¶
(scaled) forward step \(y = \alpha A x\)
- Parameters:
x (Array)
- Return type:
Array
Examples
- property dev: str¶
device
- property img_origin: Array¶
image origin - world coordinates of the [0,0,0] voxel
- property in_shape: tuple[int, int, int]¶
Image shape
(n0, n1, n2).
- property lor_descriptor: EqualBlockPETLORDescriptor¶
LOR descriptor
- norm(xp: ModuleType | None = None, dev: str | None = None, num_iter: int = 30, iscomplex: bool = False, verbose: bool = False) float¶
estimate norm of the linear operator using power iterations
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.num_iter (int, optional) – number of power iterations
iscomplex (bool, optional) – use complex arrays
verbose (bool, optional) – verbose output
- Returns:
the norm of the linear operator
- Return type:
float
Examples
- property num_chunks: int¶
Number of chunks to split block pairs into during projection.
Increasing this reduces peak GPU memory usage at the cost of more kernel launches.
- property out_shape: tuple[int, ...]¶
(num_block_pairs, num_lors_per_block_pair)for non-TOF, with a trailingnum_tofbinsaxis for TOF.
- property scale: float | complex¶
scalar factor applied to the linear operator
- show_geometry(ax: Axes3D, color: tuple[float, float, float] = (1.0, 0.0, 0.0), edgecolor: str = 'grey', alpha: float = 0.1) None[source]¶
show the geometry of the scanner and the FOV of the image
- Parameters:
ax (Axes3D) – matplotlib axes object with projection = ‘3d’
color (tuple[float, float, float], optional) – color to use for the FOV cube, by default (1.,0.,0.)
edgecolor (str, optional) – edgecolor to use for the FOV cube, by default ‘grey’
alpha (float, optional) – alpha value of the FOV cube, by default 0.1
- Return type:
None
Examples
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
Non-TOF and TOF projections using a modularized (block) PET scanner geometry
- property tof: bool¶
Enable or disable TOF mode.
Setting to
Truerequirestof_parametersto be set first; raisesValueErrorotherwise. Setting toFalsealways succeeds and is a no-op when TOF is already disabled.
- property tof_parameters: TOFParameters | None¶
TOF kernel parameters, or
Nonefor non-TOF mode.Assigning a
TOFParametersinstance automatically enables TOF. AssigningNonedisables TOF.
- property voxel_size: Array¶
voxel size
- property xp: ModuleType¶
array module
- class parallelproj.projectors.ListmodePETProjector(event_start_coordinates: Array, event_end_coordinates: Array, img_shape: tuple[int, int, int], voxel_size: tuple[float, float, float], img_origin: None | Array = None)[source]¶
Bases:
LinearOperatorNon-TOF and TOF listmode projector for regular-polygon PET scanners.
To enable TOF mode after construction, set the properties in this order:
projector.tof_parameters = TOFParameters(...)— sets the TOF kernel parameters (TOF remains disabled until step 3).projector.event_tofbins = <Array>— per-event TOF bin indices.projector.tof = True— activates TOF projection.
Setting
tof = Truebefore bothtof_parametersandevent_tofbinsare assigned raisesValueError. Settingevent_tofbins = Noneortof_parameters = Noneautomatically resetstoftoFalse.Examples
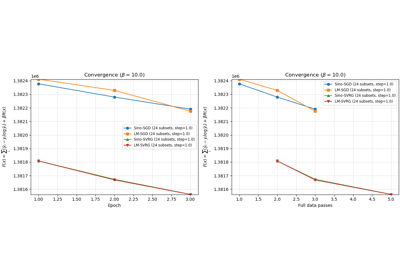
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
PDHG and LM-SPDHG to optimize the Poisson logL and total variation- Parameters:
event_start_coordinates (Array) – float world coordinates of event LOR start points, shape (num_events, 3)
event_end_coordinates (Array) – float world coordinates of event LOR end points, shape (num_events, 3)
img_shape (tuple[int, int, int]) – shape of the image to be projected
voxel_size (tuple[float, float, float]) – the voxel size of the image to be projected
img_origin (None | Array, optional) – the origin of the image to be projected, by default None means that the center of the image is at world coordinate (0,0,0)
Examples
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
PDHG and LM-SPDHG to optimize the Poisson logL and total variation- property H: AdjointLinearOperator¶
adjoint operator \(A^H\)
- __call__(x: Array) Array¶
alias to apply(x)
Examples
- Parameters:
x (Array)
- Return type:
Array
- adjoint(y: Array) Array¶
(scaled) adjoint step \(x = \overline{\alpha} A^H y\)
- Parameters:
y (Array)
- Return type:
Array
Examples
- adjointness_test(xp: ModuleType | None = None, dev: str | None = None, verbose: bool = False, iscomplex: bool = False, dtype: type | None = None, **kwargs) bool¶
test whether the adjoint is correctly implemented
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.verbose (bool, optional) – verbose output
iscomplex (bool, optional) – use complex arrays
dtype (type | None, optional) – data type of the arrays
**kwargs (dict) – passed to np.isclose
- Returns:
whether the adjoint is correctly implemented
- Return type:
bool
Examples
- apply(x: Array) Array¶
(scaled) forward step \(y = \alpha A x\)
- Parameters:
x (Array)
- Return type:
Array
Examples
- property event_end_coordinates: Array¶
coordinates of LOR end points
- property event_start_coordinates: Array¶
coordinates of LOR start points
- property event_tofbins: None | Array¶
Integer TOF bin index for each event, or
Nonefor non-TOF mode.Assigning an array enables per-event TOF binning; its length must match
num_events. AssigningNoneclears the TOF bins and disables TOF.
- property in_shape: tuple[int, int, int]¶
Image shape
(n0, n1, n2).
- norm(xp: ModuleType | None = None, dev: str | None = None, num_iter: int = 30, iscomplex: bool = False, verbose: bool = False) float¶
estimate norm of the linear operator using power iterations
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.num_iter (int, optional) – number of power iterations
iscomplex (bool, optional) – use complex arrays
verbose (bool, optional) – verbose output
- Returns:
the norm of the linear operator
- Return type:
float
Examples
- property num_events: int¶
number of events
- property out_shape: tuple[int, ...]¶
(num_events,)— one value per detected event.
- property scale: float | complex¶
scalar factor applied to the linear operator
- property tof: bool¶
Enable or disable TOF mode.
Must set
tof_parametersandevent_tofbinsbefore setting toTrue; raisesValueErrorotherwise. Settingevent_tofbinstoNoneautomatically disables TOF.
- property tof_parameters: TOFParameters | None¶
TOF kernel parameters, or
Nonefor non-TOF mode.Assigning
Nonedisables TOF.
- property voxel_size: Array¶
voxel size
- property xp: ModuleType¶
array module

- class parallelproj.projectors.ParallelViewProjector2D(image_shape: tuple[int, int], radial_positions: Array, view_angles: Array, radius: float, image_origin: tuple[float, float], voxel_size: tuple[float, float])[source]¶
Bases:
LinearOperator2D non-TOF parallel view projector
Examples

2D non-TOF filtered back projection (FBP) of Poisson data
2D non-TOF filtered back projection (FBP) of Poisson dataSet up a 2D parallel-beam projector using Joseph’s ray-tracing method.
LOR start and end points are computed from the scanner radius and the supplied radial positions and view angles. The image is treated as a 2D slice; internally a unit axial dimension is prepended so the 3D
parallelproj_corekernels can be used directly.- Parameters:
image_shape (tuple[int, int]) – Shape of the 2D input image
(n1, n2).radial_positions (Array) – Radial positions of the detector bins in world coordinates (mm).
view_angles (Array) – View angles in radians, one per projection view.
radius (float) – Scanner radius in mm (distance from centre to detector).
image_origin (tuple[float, float]) – World coordinates of the
[0, 0]voxel centre in mm(o1, o2). Internally promoted to(0, o1, o2)so the 3D backend can be used.voxel_size (tuple[float, float]) – Voxel size
(d1, d2)in mm. Internally promoted to(1, d1, d2)with a unit axial dimension.
Examples
2D non-TOF filtered back projection (FBP) of Poisson data
2D non-TOF filtered back projection (FBP) of Poisson data- property H: AdjointLinearOperator¶
adjoint operator \(A^H\)
- __call__(x: Array) Array¶
alias to apply(x)
Examples
- Parameters:
x (Array)
- Return type:
Array
- adjoint(y: Array) Array¶
(scaled) adjoint step \(x = \overline{\alpha} A^H y\)
- Parameters:
y (Array)
- Return type:
Array
Examples
2D non-TOF filtered back projection (FBP) of Poisson data
2D non-TOF filtered back projection (FBP) of Poisson data
- adjointness_test(xp: ModuleType | None = None, dev: str | None = None, verbose: bool = False, iscomplex: bool = False, dtype: type | None = None, **kwargs) bool¶
test whether the adjoint is correctly implemented
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.verbose (bool, optional) – verbose output
iscomplex (bool, optional) – use complex arrays
dtype (type | None, optional) – data type of the arrays
**kwargs (dict) – passed to np.isclose
- Returns:
whether the adjoint is correctly implemented
- Return type:
bool
Examples
- apply(x: Array) Array¶
(scaled) forward step \(y = \alpha A x\)
- Parameters:
x (Array)
- Return type:
Array
Examples
- property dev: str¶
device used for storage of LOR endpoints
- property image_origin: Array¶
World coordinates of the
[0, 0]voxel, shape(3,).The first element is always
0(the prepended axial dimension used internally by the 3D backend); elements 1 and 2 correspond to theimage_originpassed at construction.
- property image_shape: tuple[int, int]¶
image shape
- property in_shape: tuple[int, ...]¶
Image shape
(n1, n2).
- norm(xp: ModuleType | None = None, dev: str | None = None, num_iter: int = 30, iscomplex: bool = False, verbose: bool = False) float¶
estimate norm of the linear operator using power iterations
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.num_iter (int, optional) – number of power iterations
iscomplex (bool, optional) – use complex arrays
verbose (bool, optional) – verbose output
- Returns:
the norm of the linear operator
- Return type:
float
Examples
- property num_rad: int¶
number of radial elements
- property num_views: int¶
number of views
- property out_shape: tuple[int, ...]¶
Projection shape
(num_rad, num_views).
- property scale: float | complex¶
scalar factor applied to the linear operator
- show_views(views_to_show: None | Array = None, image: None | Array = None, **kwargs: Any) Figure[source]¶
Visualize the geometry of selected projection views.
- Parameters:
views_to_show (None | Array) – view numbers to show
image (None | Array) – show an image inside the projector geometry
**kwargs (dict) – passed to matplotlib.pyplot.imshow
- Returns:
the matplotlib figure
- Return type:
plt.Figure
Examples
- property voxel_size: Array¶
Voxel size, shape
(3,).The first element is always
1(the unit axial dimension used internally by the 3D backend); elements 1 and 2 correspond to thevoxel_sizepassed at construction.
- property xend: Array¶
coordinates of LOR end points
- property xp: ModuleType¶
array module
- property xstart: Array¶
coordinates of LOR start points
- class parallelproj.projectors.ParallelViewProjector3D(image_shape: tuple[int, int, int], radial_positions: Array, view_angles: Array, radius: float, image_origin: tuple[float, float, float], voxel_size: tuple[float, float, float], ring_positions: Array, michelogram: Michelogram)[source]¶
Bases:
LinearOperator3D non-TOF parallel view projector supporting any odd span.
Examples
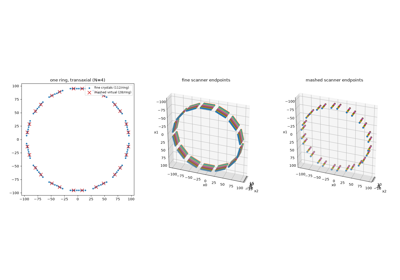
Set up a 3D parallel-beam projector using Joseph’s ray-tracing method.
Extends
ParallelViewProjector2Dto 3D by adding axial rings with support for any odd sinogram span via aMichelogram. Each sinogram plane’s axial LOR position is determined by the average z-coordinate of the ring pairs contributing to that plane (exact for span=1; the standard averaged-LOR approximation for span>1).- Parameters:
image_shape (tuple[int, int, int]) – Shape of the 3D input image
(n0, n1, n2)wheren2is axial.radial_positions (Array) – Radial positions of the detector bins in world coordinates (mm).
view_angles (Array) – View angles in radians, one per projection view.
radius (float) – Scanner radius in mm.
image_origin (tuple[float, float, float]) – World coordinates of the
[0, 0, 0]voxel centre in mm.voxel_size (tuple[float, float, float]) – Voxel size
(d0, d1, d_axial)in mm.ring_positions (Array) – Axial positions of the detector rings in world coordinates (mm). Must have length equal to
michelogram.num_rings.michelogram (Michelogram) – Axial plane layout encoding the span, max ring difference, and ring-pair grouping. Use
Michelogramwithspan=1for uncompressed data or any oddspanfor compressed data.
Examples
- property H: AdjointLinearOperator¶
adjoint operator \(A^H\)
- __call__(x: Array) Array¶
alias to apply(x)
Examples
- Parameters:
x (Array)
- Return type:
Array
- adjoint(y: Array) Array¶
(scaled) adjoint step \(x = \overline{\alpha} A^H y\)
- Parameters:
y (Array)
- Return type:
Array
Examples
- adjointness_test(xp: ModuleType | None = None, dev: str | None = None, verbose: bool = False, iscomplex: bool = False, dtype: type | None = None, **kwargs) bool¶
test whether the adjoint is correctly implemented
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.verbose (bool, optional) – verbose output
iscomplex (bool, optional) – use complex arrays
dtype (type | None, optional) – data type of the arrays
**kwargs (dict) – passed to np.isclose
- Returns:
whether the adjoint is correctly implemented
- Return type:
bool
Examples
- apply(x: Array) Array¶
(scaled) forward step \(y = \alpha A x\)
- Parameters:
x (Array)
- Return type:
Array
Examples
- property image_origin: Array¶
image origin - world coordinates of the [0,0,0] voxel
- property image_shape: tuple[int, int, int]¶
image shape
- property in_shape: tuple[int, int, int]¶
Image shape
(n0, n1, n2)wheren2is axial.
- property max_ring_diff: int¶
maximum ring difference
- property michelogram: Michelogram¶
the Michelogram defining the axial plane layout
- norm(xp: ModuleType | None = None, dev: str | None = None, num_iter: int = 30, iscomplex: bool = False, verbose: bool = False) float¶
estimate norm of the linear operator using power iterations
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.num_iter (int, optional) – number of power iterations
iscomplex (bool, optional) – use complex arrays
verbose (bool, optional) – verbose output
- Returns:
the norm of the linear operator
- Return type:
float
Examples
- property out_shape: tuple[int, int, int]¶
Sinogram shape
(num_rad, num_views, num_planes).
- property scale: float | complex¶
scalar factor applied to the linear operator
- property voxel_size: Array¶
the voxel size in all directions
- property xend: Array¶
coordinates of LOR end points
- property xp: ModuleType¶
array module
- property xstart: Array¶
coordinates of LOR start points
- class parallelproj.projectors.RegularPolygonPETProjector(lor_descriptor: RegularPolygonPETLORDescriptor, img_shape: tuple[int, int, int], voxel_size: tuple[float, float, float], img_origin: None | Array = None, views: None | Array = None, cache_lor_endpoints: bool = True)[source]¶
Bases:
LinearOperatorgeometric non-TOF and TOF sinogram projector for regular polygon PET scanners
Examples

Convergence comparison: SGD vs SVRG with logcosh regularization
Convergence comparison: SGD vs SVRG with logcosh regularization
PDHG and SPDHG for PET reconstruction with a directional TV prior
PDHG and SPDHG for PET reconstruction with a directional TV prior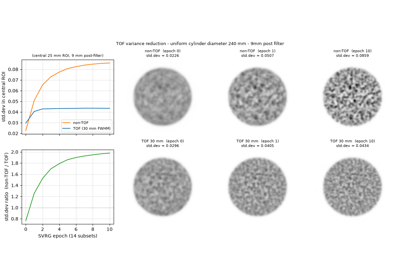
TOF vs non-TOF: variance reduction in a uniform cylinder
TOF vs non-TOF: variance reduction in a uniform cylinder
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
Transmission reconstruction: MLTR, SPS and L-BFGS-B
Transmission reconstruction: MLTR, SPS and L-BFGS-B
Accelerating MLTR with ordered subsets (OS-MLTR) and SVRG
Accelerating MLTR with ordered subsets (OS-MLTR) and SVRG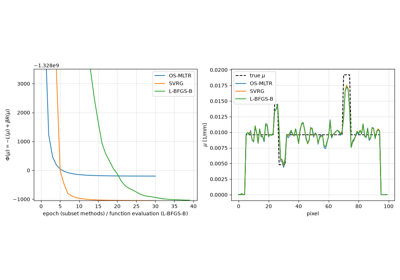
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Joint activity and attenuation reconstruction (MLAA) for TOF PET
Joint activity and attenuation reconstruction (MLAA) for TOF PET- Parameters:
lor_descriptor (RegularPolygonPETLORDescriptor) – descriptor of the LOR start / end points
img_shape (tuple[int, int, int]) – shape of the image to be projected
voxel_size (tuple[float, float, float]) – the voxel size of the image to be projected
img_origin (None | Array, optional) – the origin of the image to be projected, by default None means that the center of the image is at world coordinate (0,0,0)
views (None | Array, optional) – sinogram views to be projected, by default None means that all views are being projected
cache_lor_endpoints (bool, optional) – whether to cache the LOR endpoints, by default True setting it to False will save memory but will slow down computations
Examples
Convergence comparison: SGD vs SVRG with logcosh regularization
Convergence comparison: SGD vs SVRG with logcosh regularization
PDHG and SPDHG for PET reconstruction with a directional TV prior
PDHG and SPDHG for PET reconstruction with a directional TV prior
TOF vs non-TOF: variance reduction in a uniform cylinder
TOF vs non-TOF: variance reduction in a uniform cylinder
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
PDHG and LM-SPDHG to optimize the Poisson logL and total variation
Transmission reconstruction: MLTR, SPS and L-BFGS-B
Transmission reconstruction: MLTR, SPS and L-BFGS-B
Accelerating MLTR with ordered subsets (OS-MLTR) and SVRG
Accelerating MLTR with ordered subsets (OS-MLTR) and SVRG
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Joint activity and attenuation reconstruction (MLAA) for TOF PET
Joint activity and attenuation reconstruction (MLAA) for TOF PET- property H: AdjointLinearOperator¶
adjoint operator \(A^H\)
- __call__(x: Array) Array¶
alias to apply(x)
Examples
- Parameters:
x (Array)
- Return type:
Array
- adjoint(y: Array) Array¶
(scaled) adjoint step \(x = \overline{\alpha} A^H y\)
- Parameters:
y (Array)
- Return type:
Array
Examples
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
- adjointness_test(xp: ModuleType | None = None, dev: str | None = None, verbose: bool = False, iscomplex: bool = False, dtype: type | None = None, **kwargs) bool¶
test whether the adjoint is correctly implemented
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.verbose (bool, optional) – verbose output
iscomplex (bool, optional) – use complex arrays
dtype (type | None, optional) – data type of the arrays
**kwargs (dict) – passed to np.isclose
- Returns:
whether the adjoint is correctly implemented
- Return type:
bool
Examples
- apply(x: Array) Array¶
(scaled) forward step \(y = \alpha A x\)
- Parameters:
x (Array)
- Return type:
Array
Examples
- clear_cached_lor_endpoints() None[source]¶
clear cached LOR endpoints
Examples
Convergence comparison: SGD vs SVRG with logcosh regularization
Convergence comparison: SGD vs SVRG with logcosh regularization
PDHG and SPDHG for PET reconstruction with a directional TV prior
PDHG and SPDHG for PET reconstruction with a directional TV prior
TOF vs non-TOF: variance reduction in a uniform cylinder
TOF vs non-TOF: variance reduction in a uniform cylinder
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)- Return type:
None
- convert_sinogram_to_crystal_index_events(sinogram: Array, shuffle: bool = False) ndarray[source]¶
Convert a non-TOF or TOF span-1 sinogram to crystal-index events.
Each count in the sinogram becomes one row in the output array. Non-TOF rows are
(d_red, r_red, d_blue, r_blue); TOF rows add a trailingtof_bincolumn in the projector convention (bin 0 = closest to the canonical xstart crystal). The output is ready for direct use withregular_polygon_events_to_sinogram().The red crystal is the canonical xstart of each LOR as defined by the LOR descriptor; blue is the xend crystal. Unpack the returned array with
events[:, 0](d_red),events[:, 1](r_red), etc.- Parameters:
sinogram (Array) – Integer span-1 sinogram. Non-TOF shape:
lor_descriptor.spatial_sinogram_shape. TOF shape:(*lor_descriptor.spatial_sinogram_shape, num_tof_bins).shuffle (bool, optional) – Randomly shuffle the output rows (default
False). Uses numpy’s global random state; callnumpy.random.seedbefore this method for reproducible results.
- Returns:
events – Crystal-index events. Columns are
(d_red, r_red, d_blue, r_blue)or(d_red, r_red, d_blue, r_blue, tof_bin).- Return type:
np.ndarray, shape (N, 4) or (N, 5), dtype int32
- Raises:
TypeError – If
sinogramdoes not have an integer dtype.ValueError – If the LOR descriptor has
span > 1;start_plane_indexis only defined for span-1 descriptors.
Examples
- convert_sinogram_to_listmode(sinogram: Array, shuffle: bool = False) tuple[Array, Array, Array | None][source]¶
convert a non-TOF or TOF emission sinogram to listmode events
- Parameters:
sinogram (Array) – an integer (TOF or non-TOF) emission sinogram
shuffle (bool, optional) – if True, randomly shuffle the order of the output events, by default False. Shuffling is implemented via
numpy.random.permutation(num_events), which draws from numpy’s global random state. Usenumpy.random.seed()before calling this method for reproducible results.
- Returns:
event_start_coordinates, event_end_coordinates, event_tofbins in case of non-TOF, event_tofbins is None
- Return type:
tuple[Array, Array, Array | None]
Examples
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
- fov_mask() Array[source]¶
Boolean cylindrical FOV mask for this projector’s image grid.
The cylinder radius equals the transaxial distance of the midpoint of the first LOR of the first sinogram view from the scanner isocenter. The cylinder axis is aligned with the scanner’s symmetry axis.
- Returns:
Trueinside the cylindrical FOV,Falseoutside.- Return type:
Array of bool, shape
in_shape
Examples
Convergence comparison: SGD vs SVRG with logcosh regularization
Convergence comparison: SGD vs SVRG with logcosh regularization
TOF vs non-TOF: variance reduction in a uniform cylinder
TOF vs non-TOF: variance reduction in a uniform cylinder
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Convergence comparison: SGD vs SVRG with regularization (sinogram and listmode)
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
Penalised transmission reconstruction (MAPTR) with an edge-preserving prior
- property img_origin: Array¶
image origin - world coordinates of the [0,0,0] voxel
- property in_shape: tuple[int, int, int]¶
Image shape
(n0, n1, n2).
- property lor_descriptor: RegularPolygonPETLORDescriptor¶
LOR descriptor
- norm(xp: ModuleType | None = None, dev: str | None = None, num_iter: int = 30, iscomplex: bool = False, verbose: bool = False) float¶
estimate norm of the linear operator using power iterations
- Parameters:
xp (ModuleType, optional) – array module to use. Defaults to the operator’s own namespace (
self.xp) when it exposes one; otherwise must be given.dev (str, optional) – device (cpu or cuda). Defaults to the operator’s own device (
self.dev) when it exposes one, else the default device.num_iter (int, optional) – number of power iterations
iscomplex (bool, optional) – use complex arrays
verbose (bool, optional) – verbose output
- Returns:
the norm of the linear operator
- Return type:
float
Examples
- property out_shape: tuple[int, ...]¶
Sinogram shape respecting
sinogram_order, optionally with a trailing TOF axis.
- property scale: float | complex¶
scalar factor applied to the linear operator
- show_geometry(ax: Axes3D, color: tuple[float, float, float] = (1.0, 0.0, 0.0), edgecolor: str = 'grey', alpha: float = 0.1) None[source]¶
show the geometry of the scanner and the FOV of the image
- Parameters:
ax (Axes3D) – matplotlib axes object with projection = ‘3d’
color (tuple[float, float, float], optional) – color to use for the FOV cube, by default (1.,0.,0.)
edgecolor (str, optional) – edgecolor to use for the FOV cube, by default ‘grey’
alpha (float, optional) – alpha value of the FOV cube, by default 0.1
- Return type:
None
Examples
- property tof: bool¶
Enable or disable TOF mode.
Setting to
Truerequirestof_parametersto be set first; raisesValueErrorotherwise. Setting toFalsealways succeeds and is a no-op when TOF is already disabled.
- property tof_parameters: TOFParameters | None¶
TOF kernel parameters, or
Nonefor non-TOF mode.Assigning a
TOFParametersinstance automatically enables TOF and recomputesout_shape. AssigningNonedisables TOF.
- property views: Array¶
View indices to project.
Assigning a new array recomputes
out_shapeand clears any cached LOR endpoint arrays.
- property voxel_size: Array¶
voxel size
- property xend: Array | None¶
cached coordinates of LOR end points
- property xp: ModuleType¶
array module
- property xstart: Array | None¶
cached coordinates of LOR start points